VCM Requirements
This post will try to collect the main requirements on the DIY VCM. Even though it likely never will be formally tested, it is a good thing to get a grasp of what is needed before finalizing the design. This is also great to document for future reference.
Environmental
The VCM will be mounted inside the drivers compartment, though it still needs to be fairly rugged. Since the car will be driven in Sweden, low temperatures is more likely than really high, though it may become a nice-weather-car.
Ingress protection
The VCM shall have IP67 ingress protection
Temperature
The VCM shall be designed for an operating temperature of -40 to +60 °C.
Shock and vibration
TBD
Condensation
The enclosure shall be fitted with a GoreTex breather membrane to prevent internal condensation
Electrical
These are the electrical requirements on the VCM
Supply voltage
Th VCM shall be designed for a nominal voltage of 12 VDC but be fully operational between 8 to 18 VDC
Supplies
The VCM shall have 3 different supply rails with the following current consumption.
Constant
- Operational: 100 mA
- Sleep: 0.1 mA
Ignition
- Operational: 10 A
- Sleep: disconnected
Crank
- Momentarily: < 10 mA (Just digital input)
High side driver
The high side driver shall be able to supply 3 A continously, and 10 A during inrush events
The high side driver shall be suppplied from the ignition input.
Low side drivers
The low side drivers shall be able to sink 1 A continously, and 5 A during inrush events.
The low side drivers shall be grounded to two separate pins on the connectors.
Mechanical
Most mechanical properties is set by the ModICE enclosure.
Enclosure
The VCM shall use the Cinch ModICE ME-MX enclosure with breather vent.
Part nbr: 581-01-30-075
Connectors
The VCM shall use The Cinch ModICE header with two 12-pin Molex MX150 connectors
Part nbr: 581-01-24-011
The matching wire harness connectors are
- Keying A (black): Molex MX120 33472-1201
- Keying B (light gray): Molex MX120 33472-1202
With the pin terminals:
- 14-16 AWG (1.5-2.5 mm2): 33012-2001
- 18-20 AWG (0.5-0.75 mm2): 33012-2002
- 22 AWG (0.34 mm2): 33012-2003
Mounting
The VCM shall be mounted using 2 x M6 screws with washers. The discance between the mounting holes is 101.6 mm (4”)
I/O
The connectors have the following pinout
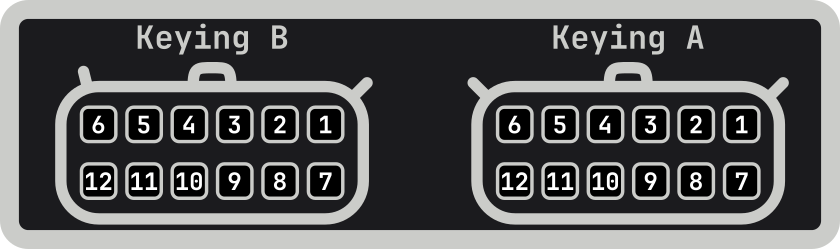 VCM pinout
VCM pinout
| Pin | Keying A (black) | Keying B (light gray) |
|---|---|---|
| 1 | GND | LSD GND |
| 2 | CAN1 Low | CAN2 Low |
| 3 | CAN1 High | CAN2 High |
| 4 | TBD | Waterpump PWM Out |
| 5 | Charger connected | Waterpump PWM In |
| 6 | TBD | Ignition |
| 7 | Accelerator GND | LSD GND |
| 8 | Accelerator IN1 | Lower contactor |
| 9 | Accelerator IN2 | Upper contactor |
| 10 | Accelerator +5V | Precharge |
| 11 | Brake IN | High side drive |
| 12 | B+ | Ignition |
CAN
There are two CAN busses available on the device designed for 500 kbit/s ISO 11898-1 communication.
CAN 1 - EV-CAN
This is the main CAN-bus and the only one that is monitored by the safety monitor. This should be used for all safety related funtionality e.g. torque request. More info on the EV-CAN post.
CAN 2 - Auxillary
TBD, maybe to the instrument cluster and lighting control?
High side driver
The high side driver is controlled by the VCM monitor application, it is sourced by the ignition supply and will be enabled as long as no critical fault has been detected. This should drive the high side of both the main and pre-charge contactors.
Low side drivers
The low side drivers are controlled by the VCM main application alowing each contactor to be controlled individually as long as the high side driver is enabled.
Pre-charge
The pre-charge output is used to control a smaller contactor in series with a high power resistor that can charge the inverter capacitor bank before closing the main contactor.
Top contactor
The top contactor output is used to control the main contactor on the positive terminal of the battery.
Bottom contactor
The top contactor output is used to control the main contactor on the negative terminal of the battery.
Accelerator pedal
The VCM shall be able to interface a dual channel electrical accelerator pedal based on 5V Hall effect sensors.
Accelerator +5V / GND
The VCM shall be able to support the accelerator pedal with 5 VDC at a maximum of 0.5 A.
Accelerator Signal 1 & 2
The VCM shall have two independent 0 - 5 VDC sensor inputs from the accelerator pedal that are monitored for safety.
Brake
The VCM shall have a 12 VDC input from the brake pedal to prevent positive torque and request regenerative brakeing from the inverter.
Charger connected
The VCM shall have a 12 VDC input from the charging inlet notifying the VCM if a charging cable is connected.
Waterpump PWM
The waterpump is controlled and monitored using a 5V PWM signal described in this post
PWM Output
The VCM shall control the waterpump speed according to Waterpump PWM
RPM Input
The VCM shall monitor the waterpump speed reading the rpm output signal accoring to post
Functional
These are the high level functional requirements, see posts on VCM main application and VCM monitor application for more detailed functional requirements.
Safety
The VCM shall have a separate monitoring CPU controlling the high side driver. This will enable releasing the main contactor in case of a serious fault condition. See the posts on overall Safety Architecture and the VCM monitor application for more details.
Functional States
The VCM has the following functional states:
stateDiagram-v2
Sleep --> Precharge: Ignition on
Precharge --> Ready: Precharge done
Ready --> Drive: Crank
Drive --> Ready: Ignition off
Ready --> Sleep: 15 min
Ready --> Charging: Charger connected
Charging --> Ready: Charger disconnected
Drive --> Fault: Safety critical fault
Charging --> Fault: Safety critical fault
Sleep
During sleep the main DC/DC power supply inside the VCM is switched off all all electronic circuitry is unpowered, the only way to wake the VCM from sleep is to supply 12V power to the ignition pin.
| High side | disabled |
| Precharge | disabled |
| Main contactors | disabled |
| Torque: | not allowed |
Precharge
During the precharge state, the precharge contactor is activated to slowly (within seconds) charge the inverter capacitor bank through a power resistor. Once the inverter capacitor voltage has reached 90% of the full battery voltage the VCM moves into the ready state.
| High side | enabled |
| Precharge | enabled |
| Main contactors | disabled |
| Torque: | not allowed (N) |
Ready
Once Precharge is done and the main contactors are closed, ready state is entered. It can also be entered by turning of the ignition while in drive state. After 15 min of idling, the VCM will enter sleep
| High side | enabled |
| Precharge | disabled |
| Main contactors | enabled |
| Torque: | not allowed (N) |
Drive
If the key is turned to the crank position while in Ready mode, VCM moves into drive mode and starts to monitor accelerator pedals and providing corresponding torque request to inverter.
| High side | enabled |
| Precharge | disabled |
| Main contactors | enabled |
| Torque: | allowed (F or R) |
Charging
If the charging cable is connected in Ready mode the VCM shall move into charging mode preventing the car to drive and allowing the PDM to charge HV battery if the cable is connected to 240 VAC.
| High side | enabled |
| Precharge | disabled |
| Main contactors | enabled |
| Torque: | not allowed (N) |
Reset
If there is a fault active that disabled the high side driver, the crank signal shall reset both the VCM main application and the VCM monitor application.